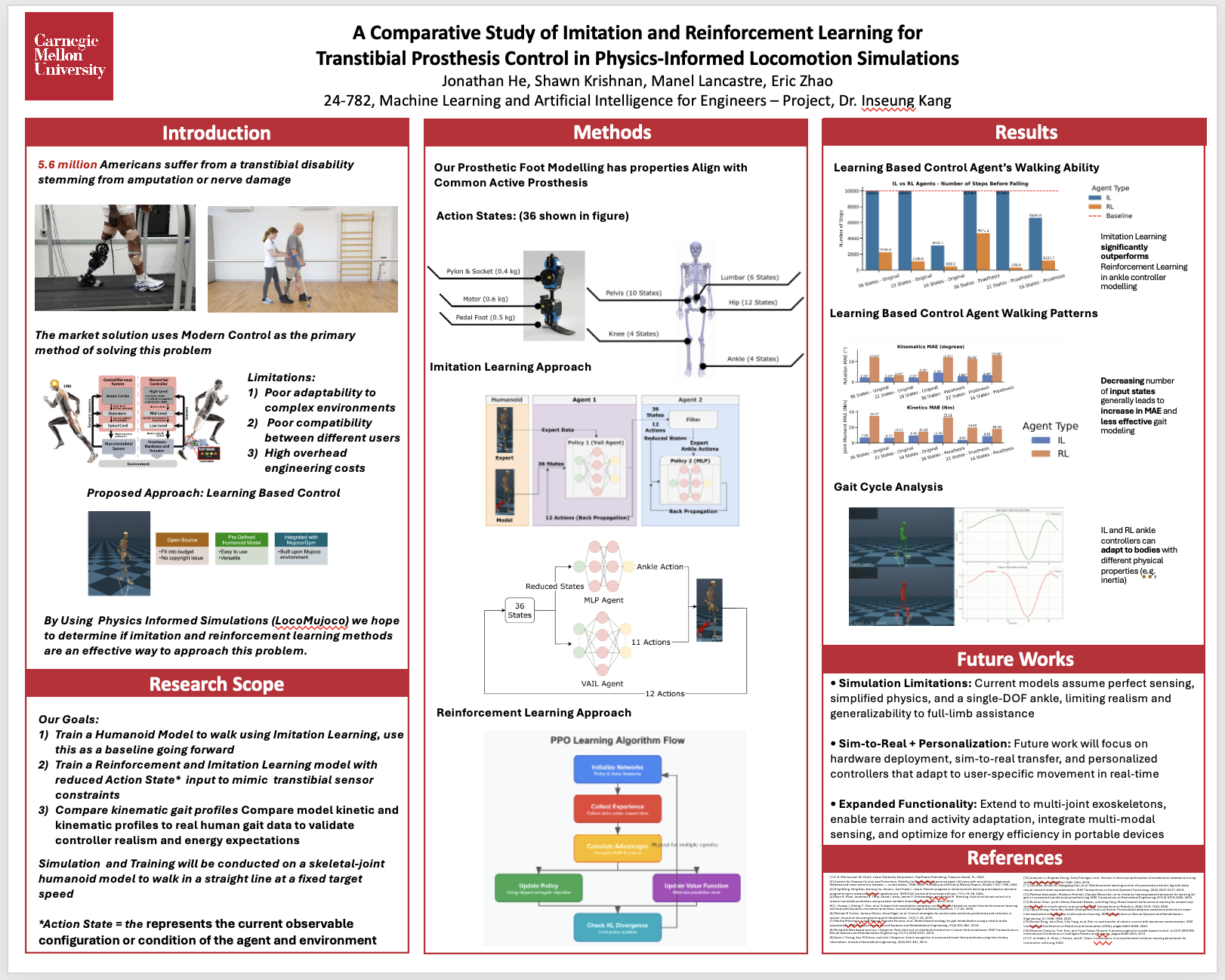
Reinforcement Learning–Based Control Policy Optimization for Transtibial Prosthesis via Physics-Informed Simulation
Lab: Meta Mobility Lab Learn more
Professor: Inseung Kang Learn more
Pending arXiv preprint; planned submission to relevant conferences
We compare imitation learning and PPO-based RL controllers for ankle assistive devices in MuJoCo, demonstrating that IL yields more stable gait reproduction and longer walking durations under varied state-space and prosthetic configurations.
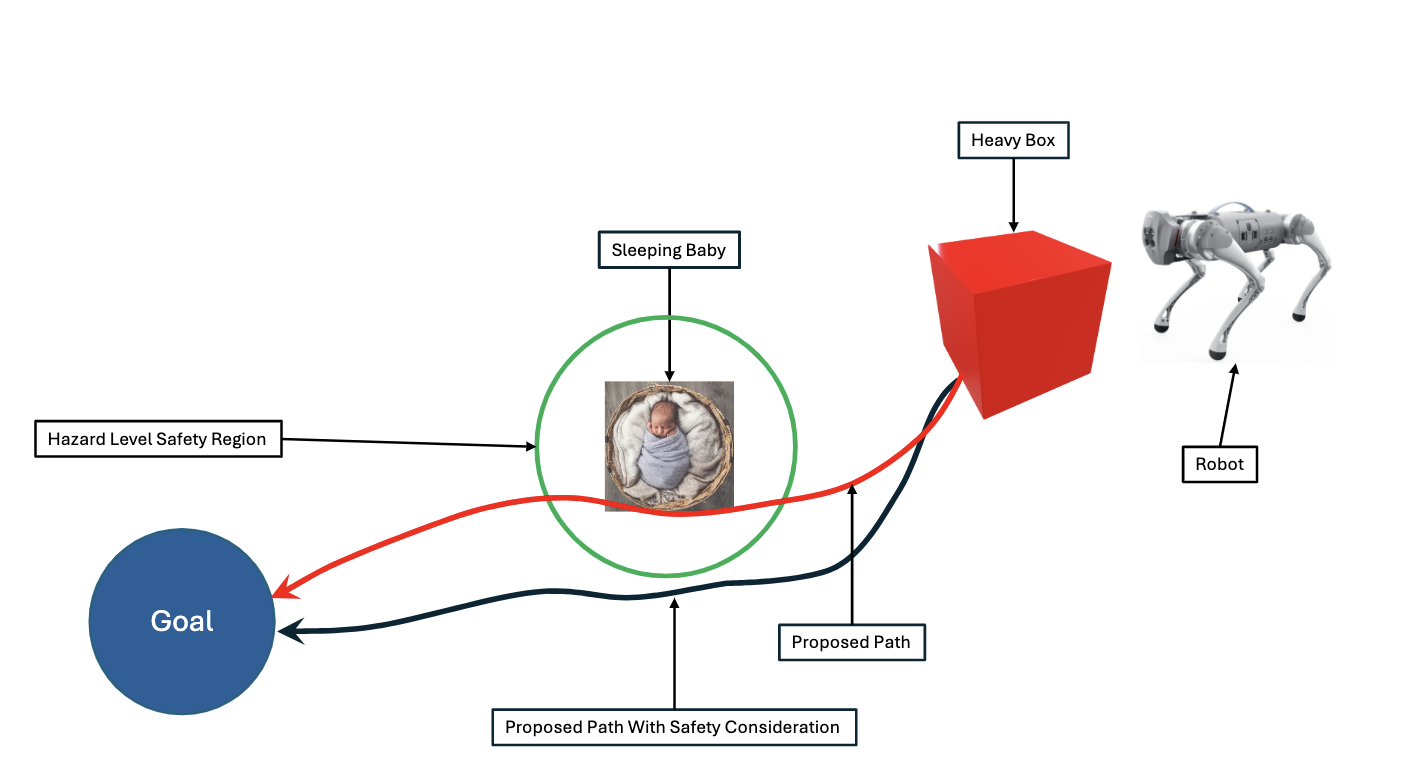
Multi-Agent Reinforcement Learning with Large Language Models for Safe Path Planning
Lab: SAFE AI Lab Learn more
Professor: Ding Zhao Learn more
Pending arXiv preprint; planned submission to relevant conferences
We integrate GPT-4 into a hierarchical MARL framework to classify obstacle severity and dynamically adjust penalty-based rewards, enabling context-aware, safety-driven path planning in unstructured environments.